Aero Hand Open: low-cost, open-source, lightweight, anthropomorphic dexterous hand
Abstract
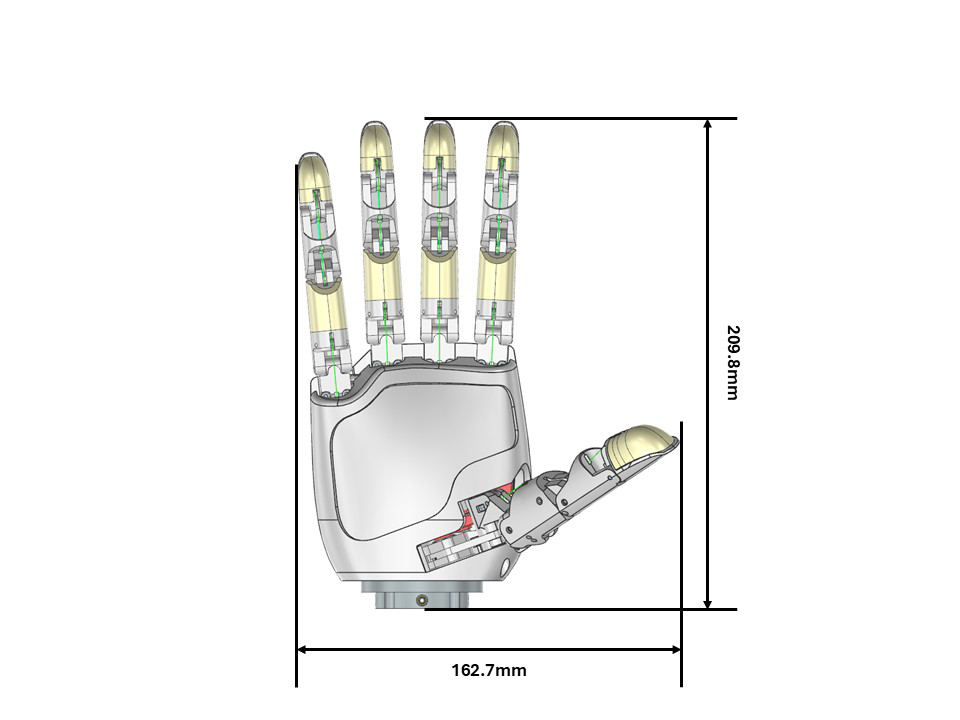
Aero Hand Open is a low-cost, open-source, lightweight (< 400 grams), anthropomorphic robotic hand designed and developed by TetherIA for affordable dexterous manipulation research. At just $314, it provides a capable alternative to expensive proprietary solutions while maintaining high performance through innovative tendon actuation.
See Aero Hand Open in action: effortlessly picking up an iPhone from a flat surface, grasping tiny M5 screws, pulling a drill trigger, opening a soda can, and accomplishing much more with precision and dexterity.
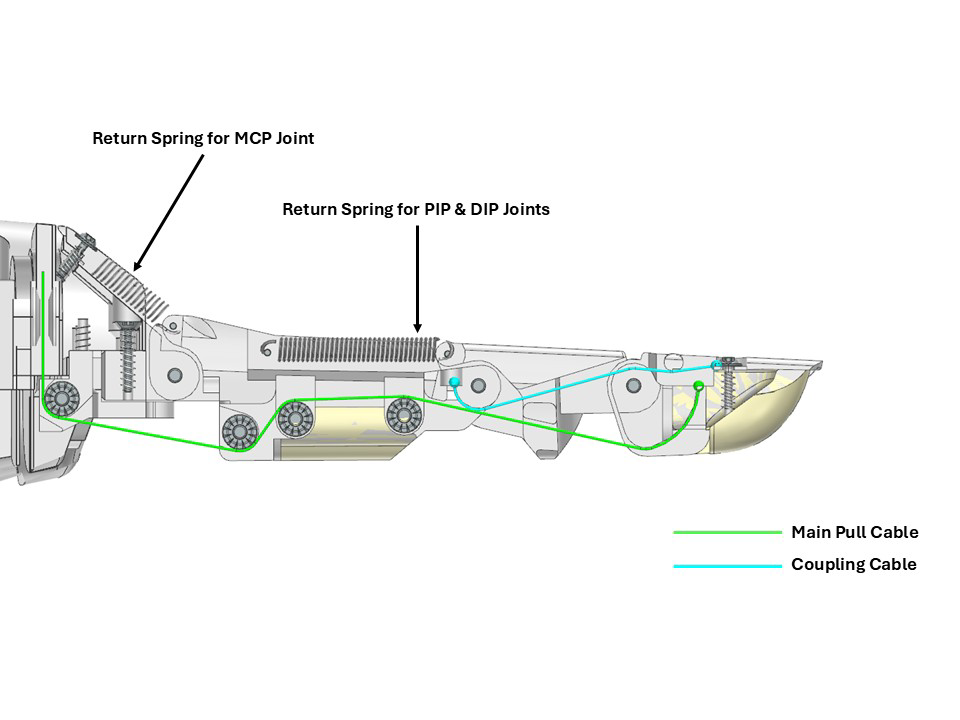
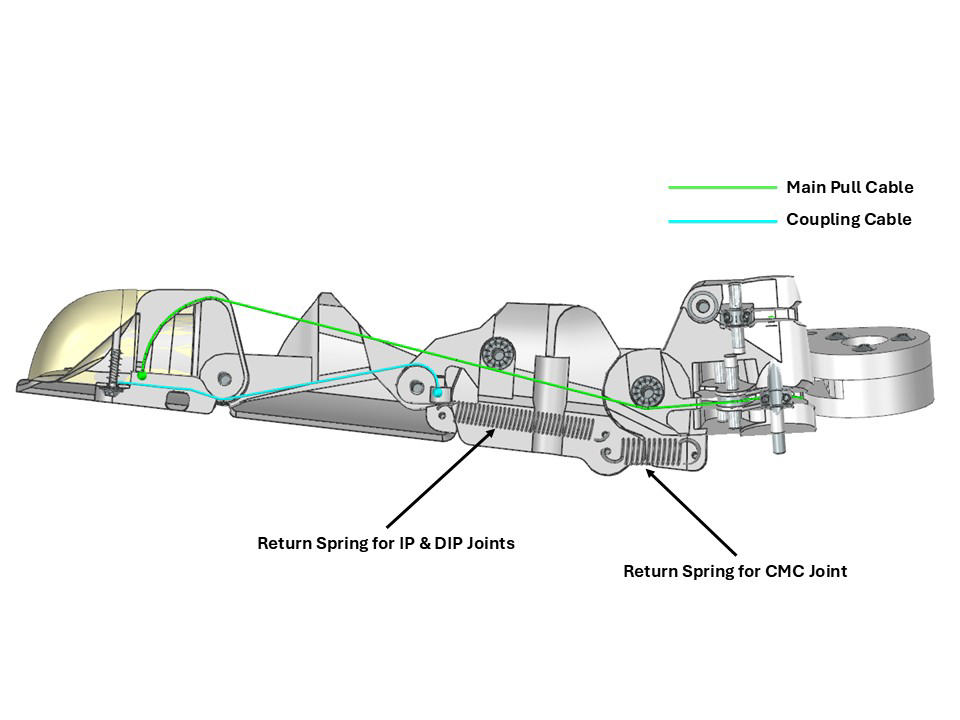
Tendon-Driven Architecture
Aero Hand Open employs a tendon-driven actuation architecture in which each motor distributes force through low-friction cable pathways to multiple joints, delivering coordinated motion without increasing actuator count.
This shared tendon routing keeps the hand under < 400 grams, while the compliant cable runs absorb impact energy to cushion interactions with objects and users.
Key Characteristics
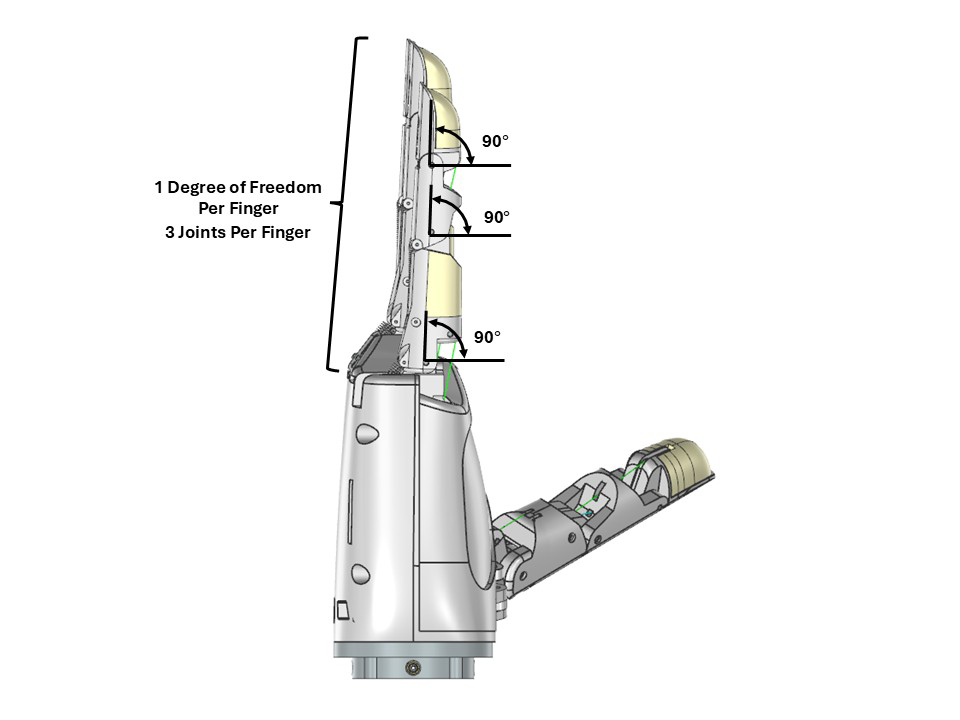
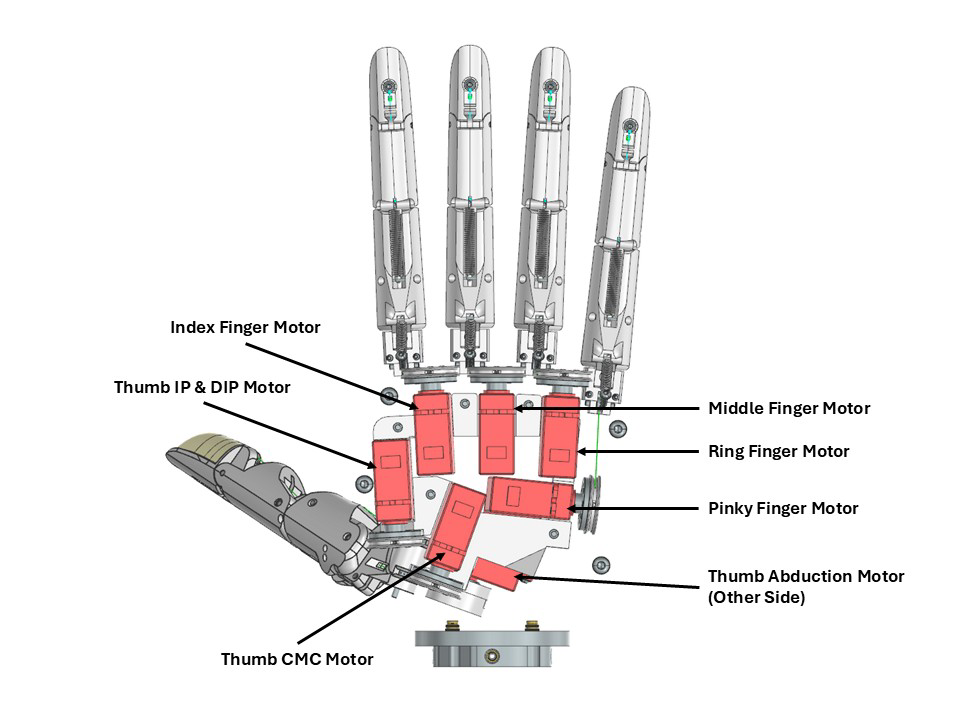
16 Joints (7 motors)
7 motors drive 16 joints to recreate natural hand synergies.
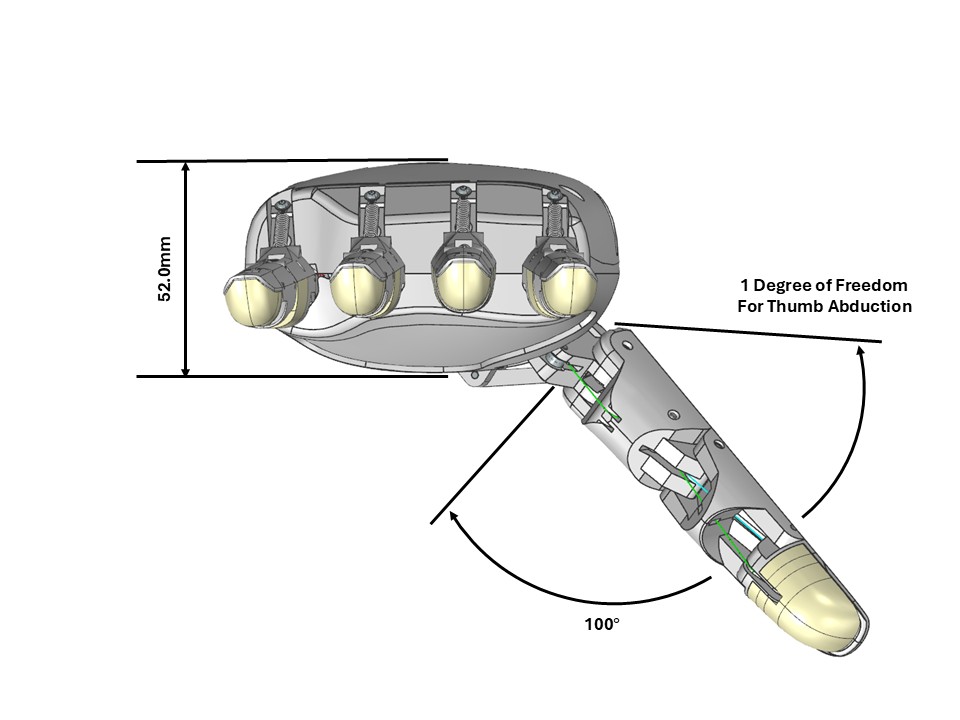
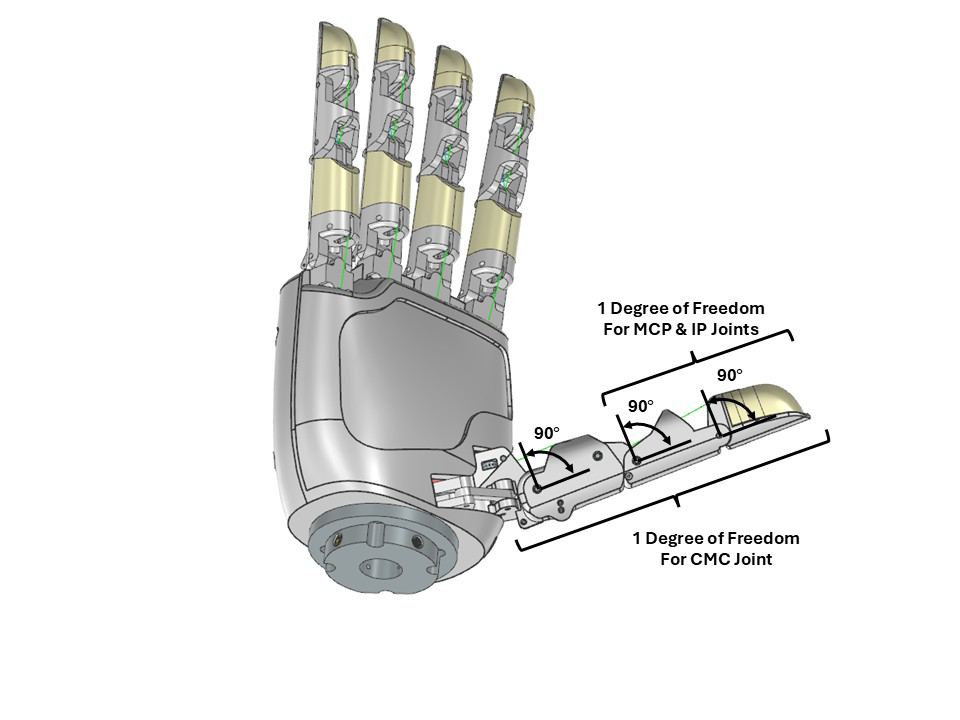
Dexterous Thumb
3 active thumb DoFs deliver opposition, pinch, and in-hand reorientation capabilities.
100% Backdrivable
Cable routing and low gearing make the hand fully backdrivable for safe, responsive control.
Multi-Modal Control
Supports position control, torque control, and inline tendon force sensing for adaptive manipulation.
Hand Payload, stronger than it looks.
The active load torque is 10 N per fingertip, sufficient to pull drill trigger and many other everyday objects.
The hand lifted a full 5-gallon water jug very easily (~18 kg)!
Finger Speed - Fast and Precise
Catching a Flying Tennis Ball
Webcam-based teleoperation running on a regular laptop
Range of Motion
Range of Motion Demo
Reliability Test: 1 Million Cycles!
Reliability Test: 1 Million Cycles, running at full speed for 5*24 hours!
RL policy (actuation-level sim2real transfer)
Training Policy (actuation-level) in Mujoco
Deployment (zero-shot sim2real transfer) in Real World
On-Device Manipulation Gallery
Watch Aero Hand Open perform everyday manipulation tasks.
BibTeX
@article{AeroHandOpen2025,
title={Aero Hand Open: low-cost, open-source, lightweight, anthropomorphic dexterous hand},
author={TetherIA team},
year={2025},
url={https://tetheria.github.io/aero-hand-open/},
repository = {https://github.com/TetherIA/aero-hand-open},
}